
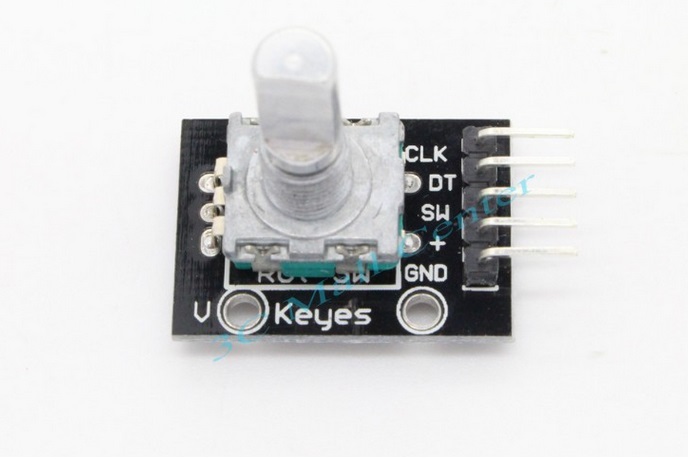
KY-040 Rotary encoder module COM kNOB
R$ 30,00
Em estoque

Descrição
Rotary encoder moduleBy rotating the rotary encoder can be counted in the positive direction and the reverse direction during rotation of the output pulse frequency, unlike rotary potentiometer counter, which Species rotation counts are not limited. With the buttons on the rotary encoder can be reset to its initial state, that starts counting from 0.How it works: incremental encoder is a displacement of the rotary pulse signal is converted to a series of digital rotary sensors. These pulses are used to control Angular displacement. In Eltra angular displacement encoder conversion using a photoelectric scanning principle. Reading system of alternating light transmitting window and the window is not Consisting of radial indexing plate (code wheel) rotating basis, while being an infrared light source vertical irradiation light to the code disk image onto the receivingOn the surface. Receiver is covered with a diffraction grating, which has the same code disk window width. The receiver’s job is to feel the rotation of the disc Resulting changes, and change the light into corresponding electrical changes. Then the low-level signals up to a higher level, and generates no interference Square pulse, which must be processed by electronic circuits. Reading systems typically employ a differential manner, about the same but the phase difference of the two waveforms Different by 180 ° compared to the signal in order to improve the quality and stability of the output signal. Reading is then the difference between the two signals formed on the basis, Thus eliminating the interference.Incremental encoderIncremental encoders give two-phase square wave, the phase difference between them 90 °, often referred to as A and B channels. One of the channels is given and speed-related Information, at the same time, by sequentially comparing two channel signals, the direction of rotation of the information obtained. There is also a special signal called Z or Zero channel, which gives the absolute zero position encoder, the signal is a square wave with the center line of channel A square wave coincide.Clockwise counterclockwiseA B1 10 10 01 01 11 00 00 1Incremental encoder accuracy depends on the mechanical and electrical two factors, these factors are: Raster indexing error, disc eccentricity, bearing eccentricity, e-reading Several means into the optical portion of the errors and inaccuracies. Determine the encoder resolution is measured in electrical degrees, the encoder accuracy depends Set the pulse encoder generates indexing. The following electrical degrees with a 360 ° rotation of the shaft to said machine, and rotation of the shaft must be a full week of Period. To know how much electrical equivalent of the mechanical angle of 360 degrees can be calculated with the following formula: Electrical 360 = Machine 360 ° / n ° pulses / revolutionFigure: A, B commutation signalsEncoder indexing error is the electrical angle of the unit two successive pulse maximum offset to represent. Error exists in any encoder, which Is caused by the aforementioned factors. Eltra encoder maximum error is ± 25 electrical degrees (declared in any condition), equivalent to the rated Offset values ± 7%, as the phase difference 90 ° (electrical) of the two channels of the maximum deviation ± 35 electrical degrees is equal to ± 10% deviation left Ratings Right.UVW incremental encoder signals In addition to the conventional encoder, there are some other electrical output signal with integrated incremental encoder. And UVW signals The integrated incremental encoder that instance, it is usually applied to the AC servo motor feedback. These magnetic signals generally appear in the AC servo motor Machine, UVW through the simulation of the magnetic signal is generally of the original function and design. In Eltra encoder, these optical signals are UVW Methods of generating, and three square wave form, are offset from each other 120 °. In order to facilitate starting the motor, the control of the starter motor to be To these the correct signal. The UVW poles in the machine axis rotation pulses repeated many times, because they directly depend on the connected electrical Machine number of poles, and for 6 or more pole motor UVW signal.—————————-Example Code—————————–int redPin = 2;int yellowPin = 3;int greenPin = 4;int aPin = 6;int bPin = 7;int buttonPin = 5;int state = 0;int longPeriod = 5000; // Time at green or redint shortPeriod = 700; // Time period when changingint targetCount = shortPeriod;int count = 0;void setup (){ pinMode (aPin, INPUT); pinMode (bPin, INPUT); pinMode (buttonPin, INPUT); pinMode (redPin, OUTPUT); pinMode (yellowPin, OUTPUT); pinMode (greenPin, OUTPUT);}void loop (){ count++; if (digitalRead (buttonPin)) { setLights (HIGH, HIGH, HIGH); } else { int change = getEncoderTurn (); int newPeriod = longPeriod + (change * 1000); if (newPeriod >= 1000 && newPeriod targetCount) { setState (); count = 0; } } delay (1);}int getEncoderTurn (){ // Return -1, 0, or +1 static int oldA = LOW; static int oldB = LOW; int result = 0; int newA = digitalRead (aPin); int newB = digitalRead (bPin); if (newA != oldA || newB != oldB) { //Something has changed if (oldA == LOW && newA == HIGH) { result = – (oldB * 2 – 1); } } oldA = newA; oldB = newB; return result;}int setState (){ if (state == 0) { setLights (HIGH, LOW, LOW); targetCount = longPeriod; state = 1; } else if (state == 1) { setLights (HIGH, HIGH, LOW); targetCount = shortPeriod; state = 2; } else if (state == 2) { setLights (LOW, LOW, HIGH); targetCount = longPeriod; state = 3; } else if (state == 3) { setLights (LOW, HIGH, LOW); targetCount = shortPeriod; state = 0; }}void setLights (int red, int yellow, int green){ digitalWrite (redPin, red); digitalWrite (yellowPin, yellow); digitalWrite (greenPin, green);}
Informação adicional
| Peso | 0,0000 kg |
|---|---|
| Dimensões | 0,0000 × 0,0000 cm |
Informações Gerais
Não há perguntas ainda.
Produtos relacionados
-
- Oferta!
- Sensores
KY-027 Magic light cup module
- O preço original era: R$ 39,37.R$ 32,81O preço atual é: R$ 32,81.
- ORÇAMENTO
-
- Oferta!
- Sensores
KY-017 Mercury open optical module
- O preço original era: R$ 53,35.R$ 44,46O preço atual é: R$ 44,46.
- ORÇAMENTO
-
- Oferta!
- Sensores
KY-012 Active buzzer module
- O preço original era: R$ 39,37.R$ 32,81O preço atual é: R$ 32,81.
- ORÇAMENTO